Media Summary: The video shows an external view of a single-command-cycle traverse from House Rock to Home from field trials conducted on ... The video shows an external view, the robot's view during the This video shows a technique to build a coupled surface-subsurface model from stereo imagery and ground-penetrating radar ...
Visual Teach Repeat Devon Island - Detailed Analysis & Overview
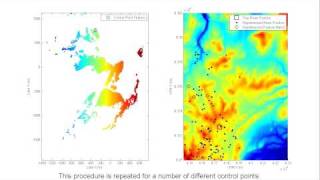
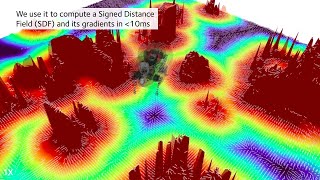
The video shows an external view of a single-command-cycle traverse from House Rock to Home from field trials conducted on ... The video shows an external view, the robot's view during the This video shows a technique to build a coupled surface-subsurface model from stereo imagery and ground-penetrating radar ... This video shows our Tethered Robot Explorer (TReX) combined with our navigation solution, In dynamic and cramped industrial environments, achieving reliable This video gives an overview of a technique created by Pat Carle to localize a rover (without GPS) by matching a long-range lidar ...
Join the Mars Institute, NASA and Google Street View on an expedition to This video shows the benefits of using reflectance images to perform This video shows the benefit of including a sun sensor directly into a In previous work we have developed a method to