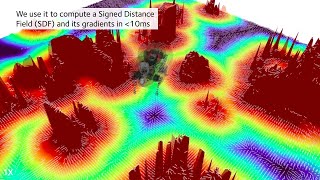
Media Summary: To achieve successful field autonomy, mobile robots need to freely adapt to changes in their environment. Visual navigation ... Did you know? - most motors run between 50%-80% The Control team highlights Ouster's Rev8 sensor, introducing the world's first native color LiDAR. Mouser Electronics' Premiere ...
An Efficient Locally Reactive Controller - Detailed Analysis & Overview
To achieve successful field autonomy, mobile robots need to freely adapt to changes in their environment. Visual navigation ... Did you know? - most motors run between 50%-80% The Control team highlights Ouster's Rev8 sensor, introducing the world's first native color LiDAR. Mouser Electronics' Premiere ... In this interactive training scenario, BVA Training Staff members Andrew M. and Devin P. will control a busy scenario at KBOS, first ... NVIDIA researchers present a hierarchical framework that combines model-based control and reinforcement learning (RL) to ... In this video, we explore ObservableCollections and how it can simplify working with dynamic data in Unity. We start with a ...
Thanks for joining the "Mini RL conference" We have published all materials: ... Please join us for WATO's first tech talk of the year! This tech talk will go over our car's Paper: Code: Building a general-purpose ... ICRA 2018 Spotlight Video Interactive Session Thu PM Pod U.5 Authors: Kappler, Daniel; Meier, Franziska; Issac, Jan; Mainprice, ...