Media Summary: Visualizing a straight-line motion of the UR5 Robot - Constant Joint Torque in Gravity Visualizing a straight-line motion of the end-effector of
Ur5 Robot Joint Trajectory Simulation - Detailed Analysis & Overview
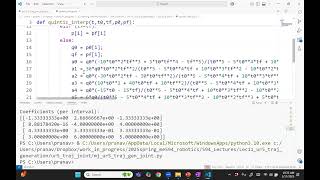
Visualizing a straight-line motion of the UR5 Robot - Constant Joint Torque in Gravity Visualizing a straight-line motion of the end-effector of This video shows how quintic polynomial (or 5th order polynomial) may be used for Sebastian Castro discusses technical concepts, practical tips, and software examples for motion