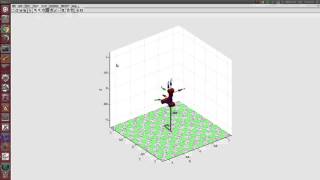
Media Summary: Visualizing a straight-line motion of the Universal Robots' This video shows how quintic polynomial (or 5th order polynomial) may be used for Sebastian Castro discusses technical concepts, practical tips, and software examples for motion
Ur5 Joint Trajectory - Detailed Analysis & Overview
Visualizing a straight-line motion of the Universal Robots' This video shows how quintic polynomial (or 5th order polynomial) may be used for Sebastian Castro discusses technical concepts, practical tips, and software examples for motion Visualizing a straight-line motion of the end-effector of Universal Robots' UR5 Robot - Constant Joint Torque in Gravity