Media Summary: This video shows how quintic polynomial (or 5th order polynomial) may be used for This is a set of videos that show how to program the Unitree A1 robot to do trot control. In the trot gait, diagonal legs move in ... Hello everyone today Romo metrics will be focusing on
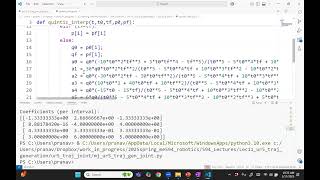
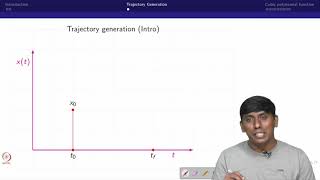
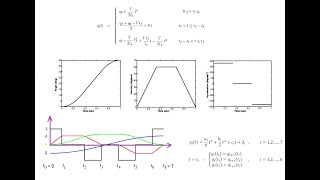
Mujocopy326 Trajectory Generation In Joint - Detailed Analysis & Overview
This video shows how quintic polynomial (or 5th order polynomial) may be used for This is a set of videos that show how to program the Unitree A1 robot to do trot control. In the trot gait, diagonal legs move in ... Hello everyone today Romo metrics will be focusing on This video shows how to perform inverse kinematics for tracking a This video demonstrates use of the Denavit-Hartenberg convention for defining the reference frames of a kinematic chain. In short ... ... control the robot with some actions we have total of 17
This set of videos shows how to program the Unitree A1 robot to do trot control. In the trot gait, diagonal legs move in unison.