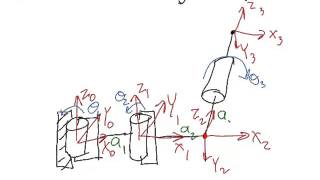
Media Summary: And s is a value of zero in this case because there is no distance along along z2 to get to the next coordinate This video is a tutorial that covers the forward and inverse kinematic calculations for a 6 axis robot arm. Here are a few links ... For more robotics videos, go to www.robogrok.com.
Denavit Hartenberg Reference Frame Layout - Detailed Analysis & Overview
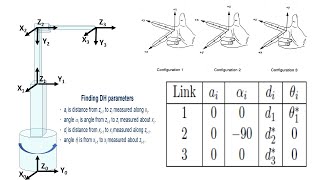
And s is a value of zero in this case because there is no distance along along z2 to get to the next coordinate This video is a tutorial that covers the forward and inverse kinematic calculations for a 6 axis robot arm. Here are a few links ... For more robotics videos, go to www.robogrok.com. This video explains the D-H modeling of the cylindrical robot to find the transformation matrix. In this video, you are given the definitions of the four For complete curriculum and to get the parts kit used in this class, go to www.robogrok.com.
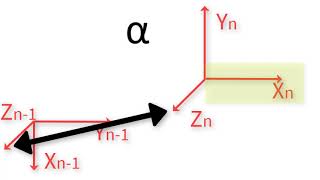
This video explains the transformation between the two