Media Summary: Visualizing a straight-line motion of the Universal Robots' UR5 Robot - Constant Joint Torque in Gravity Visualizing a straight-line motion of the end-effector of Universal Robots'
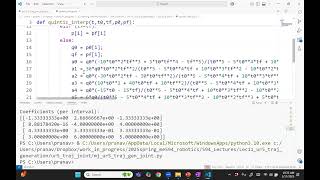
Ur5 Quintic Joint Trajectory Simulation - Detailed Analysis & Overview
Visualizing a straight-line motion of the Universal Robots' UR5 Robot - Constant Joint Torque in Gravity Visualizing a straight-line motion of the end-effector of Universal Robots' UR5 stops during intermediate points of the trajectory using movej (ROS + Moveit)