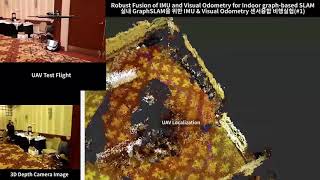
Media Summary: IROS2020 Place recognition is a core component of Simultaneous Localization and Mapping (SLAM) algorithms. Particularly in ... wonkeunyoun.com This research was performed in KARI(Korea Aerospace Research Institute) - In this video we provide an overview of our recent paper: Driven to Distraction: Self-Supervised Distractor Learning for
Robust Line Based Visual Odometry - Detailed Analysis & Overview
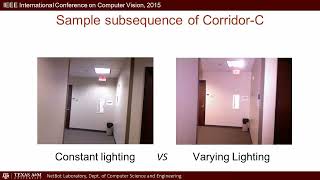
IROS2020 Place recognition is a core component of Simultaneous Localization and Mapping (SLAM) algorithms. Particularly in ... wonkeunyoun.com This research was performed in KARI(Korea Aerospace Research Institute) - In this video we provide an overview of our recent paper: Driven to Distraction: Self-Supervised Distractor Learning for ICRA 2018 Spotlight Video Interactive Session Wed AM Pod V.7 Authors: Sun, Ke; Mohta, Kartik; Pfrommer, Bernd; Watterson, ... A hybrid VO system that utilizes both the learning- Video attachment of the following paper: Yan Lu and Dezhen Song,
This work is presented at the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017). Code is ... Presentation by Yafei Hu, part of the AirLab Summer School 2020. Sessions list, overviews, and links to repos: ...
![Robust Line based Visual Odometry [RoblineVO]](https://i.ytimg.com/vi/Msun8gT1svs/mqdefault.jpg)