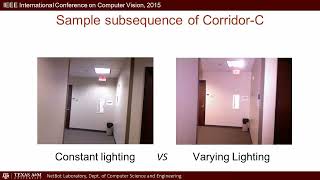
Media Summary: Video attachment of the following paper: Yan Lu and Dezhen Song, RGB-D Inertial Odometry for a Resource-RestrictedRobot in Dynamic Environments presentation Sensitivity to illumination conditions poses a challenge when utilizing visual
Robust Rgb D Odometry Using - Detailed Analysis & Overview
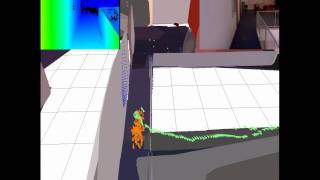
Video attachment of the following paper: Yan Lu and Dezhen Song, RGB-D Inertial Odometry for a Resource-RestrictedRobot in Dynamic Environments presentation Sensitivity to illumination conditions poses a challenge when utilizing visual In the demo, we map a room about 16 square metres in real-time and then relocalise the poses of lost