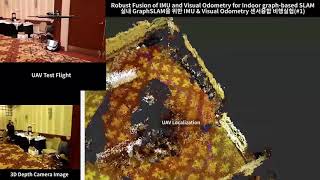
Media Summary: wonkeunyoun.com This research was performed in KARI(Korea Aerospace Research Institute) - Inference of three-dimensional structure & motion from the fusion of inertial and This video shows experimental results on public datasets and real-world environments with our recently proposed
Robust Imu Visual Odometry Sensor - Detailed Analysis & Overview
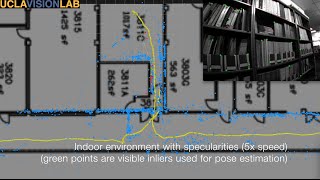
wonkeunyoun.com This research was performed in KARI(Korea Aerospace Research Institute) - Inference of three-dimensional structure & motion from the fusion of inertial and This video shows experimental results on public datasets and real-world environments with our recently proposed IROS2020 Place recognition is a core component of Simultaneous Localization and Mapping (SLAM) algorithms. Particularly in ... Reference: Z. Zhang, C. Forster, D. Scaramuzza Active Exposure Control for Using a modified verison of the popular ROVIO (
Video for the ICRA 2021 submission. VID-Fusion: Hey Viewers, In this demonstration, we showcase a full simulation of Arno Solin, Santiago Cortes, Esa Rahtu, Juho Kannala This paper presents a novel method for




![Robust Line based Visual Odometry [RoblineVO]](https://i.ytimg.com/vi/Msun8gT1svs/mqdefault.jpg)





