Media Summary: This work is presented at the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017). Code is ... In this video we provide an overview of our recent paper: Driven to Distraction: Self-Supervised Distractor Learning for This work is presented at the British Machine
Robust Edge Based Visual Odometry - Detailed Analysis & Overview
This work is presented at the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017). Code is ... In this video we provide an overview of our recent paper: Driven to Distraction: Self-Supervised Distractor Learning for This work is presented at the British Machine The video presents our paper at IROS 2021: "Towards Xin Wang, Wei Dong, Renju Li, Mingcai Zhou, Hongbin Zha BMVC 2016. Changhyeon Kim, Pyojin Kim, Sangil Lee, and H. Jin Kim*, “
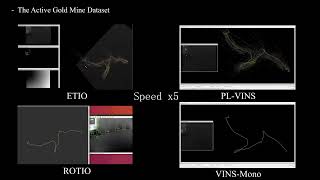
This video shows experimental results on public datasets and real-world environments with our recently proposed wonkeunyoun.com This research was performed in KARI(Korea Aerospace Research Institute) -






![[IROS 2018] Edge-based Robust RGB-D Visual Odometry Using 2-D Edge Divergence Minimization](https://i.ytimg.com/vi/Wgkzji_9SrQ/mqdefault.jpg)