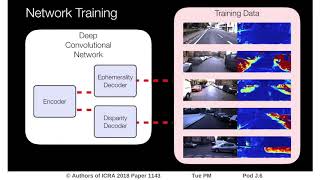
Media Summary: In this video we provide an overview of our recent paper: Driven to Distraction: Self-Supervised Distractor Learning for The video presents our paper at IROS 2021: " ICRA 2018 Spotlight Video Interactive Session Tue PM Pod J.6 Authors: Barnes, Dan; Maddern, Will; Pascoe, Geoffrey; Posner, ...
Towards Robust Monocular Visual Odometry - Detailed Analysis & Overview
In this video we provide an overview of our recent paper: Driven to Distraction: Self-Supervised Distractor Learning for The video presents our paper at IROS 2021: " ICRA 2018 Spotlight Video Interactive Session Tue PM Pod J.6 Authors: Barnes, Dan; Maddern, Will; Pascoe, Geoffrey; Posner, ... Demo video using two non-overlapped fisheye cameras to improve the Velocity estimation using a Monocular Visual Odometry algorithm Latest, improved results and the underlying software belong to Kaarta. Please check out our commercial products: ...
This video shows experimental results on public datasets and real-world environments with our recently proposed This video demonstrates the capabilities of Qualcomm Research's Inside my school and program, I teach you my system to become an AI engineer or freelancer. Life-time access, personal help by ... This video shows experimental results of a



![[2022,IROS]Towards Robust Visual-Inertial Odometry with Multiple Non-Overlapping Monocular Cameras](https://i.ytimg.com/vi/r7QvPth1m10/mqdefault.jpg)




![UR-MVO: Robust Monocular Visual Odometry for Underwater Scenarios [ICRA 2025]](https://i.ytimg.com/vi/bRFx_lIF9H4/mqdefault.jpg)


