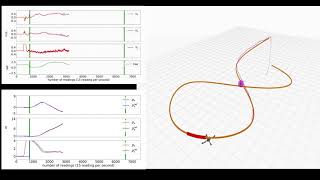
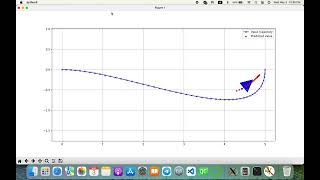
Media Summary: This project discusses a real-time implementation of a hierarchical model predictive control ( This lecture provides an overview of model predictive control ( NMPC based end-effector trajectory tracking on KUKA iiwa14
Nmpc Based Trajectory Tracker - Detailed Analysis & Overview
This project discusses a real-time implementation of a hierarchical model predictive control ( This lecture provides an overview of model predictive control ( NMPC based end-effector trajectory tracking on KUKA iiwa14 MPC-based Unified Trajectory Planning and Tracking Control Approach for Automated Guided Vehicles This is just a demonstration. Here my GitHub: