Media Summary: Learn how to implement model predictive control for This lecture provides an overview of model predictive control ( Master's Thesis in Ho Chi Minh City University of Technology Address: 268 Ly Thuong Kiet St., Dist.10, HCMC Email: ...
Mpc Based Path Tracking Simulation - Detailed Analysis & Overview
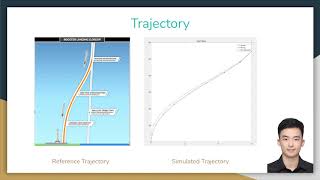
Learn how to implement model predictive control for This lecture provides an overview of model predictive control ( Master's Thesis in Ho Chi Minh City University of Technology Address: 268 Ly Thuong Kiet St., Dist.10, HCMC Email: ... This project discusses a real-time implementation of a hierarchical model predictive control ( UC Berkeley Fall2017 ME C231A Final Project Taohan Wang, Jiayang Cao, Anke Zhang, Moyu Li, Ming-Hsueh Wu, Jialong Ren. Team Member: Harry Zhang, Junhao Yu, Jiarun Wei We propose a method to generate a (near) optimal rocket landing