Media Summary: NMPC based end-effector trajectory tracking on KUKA iiwa14 This lecture provides an overview of model predictive control ( Abstract: We consider the problem of bridging the gap between geometric
Nmpc Based Trajectory Tracking On - Detailed Analysis & Overview
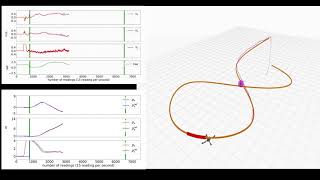
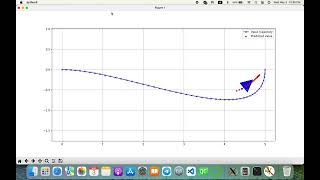
NMPC based end-effector trajectory tracking on KUKA iiwa14 This lecture provides an overview of model predictive control ( Abstract: We consider the problem of bridging the gap between geometric The video shows the experimental results obtained by comparing a classical PD controller with a Nonlinear Model Predictive ... This is just a demonstration. Here my GitHub: