Media Summary: MPC-based Unified Trajectory Planning and Tracking Control Approach for Automated Guided Vehicles This project discusses a real-time implementation of a hierarchical model predictive control ( This lecture provides an overview of model predictive control (
Mpc Based Unified Trajectory Planning - Detailed Analysis & Overview
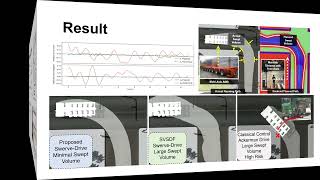
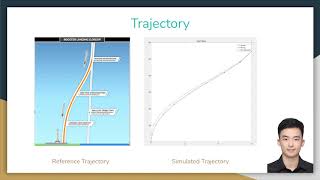
MPC-based Unified Trajectory Planning and Tracking Control Approach for Automated Guided Vehicles This project discusses a real-time implementation of a hierarchical model predictive control ( This lecture provides an overview of model predictive control ( MPC-based Trajectory Planning and Tracking Control (experiment 2) Team Member: Harry Zhang, Junhao Yu, Jiarun Wei We propose a method to generate a (near) optimal rocket landing UC Berkeley Fall2017 ME C231A Final Project Taohan Wang, Jiayang Cao, Anke Zhang, Moyu Li, Ming-Hsueh Wu, Jialong Ren.
UAV Formation Flight:Trajectory Planning & Collision Avoidance with MPC