Media Summary: This MATLAB/Simulink simulation shows fixed-wing UAVs decentralized collective motion Our Swarm Systems Lab. at CITIC UGR & Universidad de Granada archived the coordination of a robot swarm orbiting a convex ... This work was part of a masters course in wintersemester 17/18 at Bochum University of Applied Sciences. Two spherical robots ...
Muti Circular Formation Control - Detailed Analysis & Overview
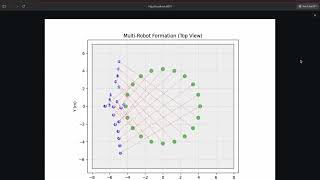
This MATLAB/Simulink simulation shows fixed-wing UAVs decentralized collective motion Our Swarm Systems Lab. at CITIC UGR & Universidad de Granada archived the coordination of a robot swarm orbiting a convex ... This work was part of a masters course in wintersemester 17/18 at Bochum University of Applied Sciences. Two spherical robots ... The Training of DDPG Environment: Robotarium Simulation 1 ... Simulation of five agents governed by a time-varying circular formation control with collision avoidance
This video presents the experiments performed in the scope of the M.Sc. Thesis of Pedro Trindade, entitled "Distributed This video demonstrates a framework for a system of multiple heterogeneous vehicles (i.e. UAVs and UGVs) to navigate in a ... Using the developed Type-2 fuzzy controller, two Turtlebot robots form a



![[SpheRobs] Formation control with two spherical robots - Moving in a circular formation](https://i.ytimg.com/vi/YSEeUglux-c/mqdefault.jpg)