Media Summary: In this video, we demonstrate the power of X-Klaim, a high-level coordination language, for implementing a The HeRoSwarm project from the Heterogeneous This project is about a group of robotic system which has
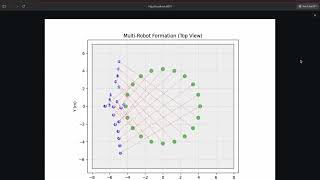
Multi Robot Control Circular Formation - Detailed Analysis & Overview
In this video, we demonstrate the power of X-Klaim, a high-level coordination language, for implementing a The HeRoSwarm project from the Heterogeneous This project is about a group of robotic system which has Video supplement to our 2015 IEEE International Conference on Adaptive Distributed Fault-Tolerant Formation Control for Multi-Robot System



![[HeRoLab] HeRoSwarm - Multi-Robot Formation Control Demo](https://i.ytimg.com/vi/DiLuNy2J9R0/mqdefault.jpg)







