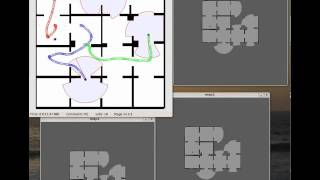
Media Summary: This video showcases our thesis work during the spring of 2023. Four Turtlebot3 Video demonstration showing example simulation trials and real-world demonstrations for the below paper. Title: CQLite: ... Kai M. Wurm, Cyrill Stachniss, and Wolfram Burgard Coordinated
Multi Robot Exploration Using A - Detailed Analysis & Overview
This video showcases our thesis work during the spring of 2023. Four Turtlebot3 Video demonstration showing example simulation trials and real-world demonstrations for the below paper. Title: CQLite: ... Kai M. Wurm, Cyrill Stachniss, and Wolfram Burgard Coordinated ANTS/SWARM 2026 paper We study the problem of deploying R mobile Apresentação de um artigo que utiliza tecniicas de robótica de enxame e de grupo.