Media Summary: ANTS/SWARM 2026 paper We study the problem of deploying R mobile Authors: Suyun Bae, Federico Rossi, Joshua Vander Hook, Scott Davidoff, Kwan-Liu Ma VIS website: ... Authors: Aalok Patwardhan, Andrew J. Davison Dyson
Multi Robot Visibility Based Connected - Detailed Analysis & Overview
ANTS/SWARM 2026 paper We study the problem of deploying R mobile Authors: Suyun Bae, Federico Rossi, Joshua Vander Hook, Scott Davidoff, Kwan-Liu Ma VIS website: ... Authors: Aalok Patwardhan, Andrew J. Davison Dyson Videos of tests with real robots reported in: Anna Mannucci, Lucia Pallottino and Federico Pecora. Provably Safe Video made to accompany a submission to IROS 2009 conference. Create More information available at: www.ros.org/wiki/multi_robot_collision_avoidance.
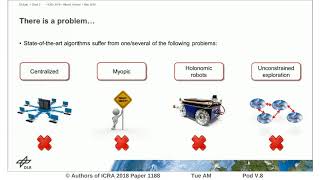
Read the paper: What manipulation tasks can you do ... Accompanying video for the paper "AVERT: An Autonomous ICRA 2018 Spotlight Video Interactive Session Tue AM Pod V.8 Authors: Viseras, Alberto; Xu, Zhe; Merino, Luis Title: Distributed ... Designed in response to the DARPA Subterranean Challenge, the Navigation Stack enables a Paper: Nestmeyer T, Robuffo Giordano P, Bülthoff HH, Franchi A. Decentralized Simultaneous