Media Summary: ICRA 2018 Spotlight Video Interactive Session Tue AM Pod V.8 Authors: Viseras, Alberto; Xu, Zhe; Merino, Luis Title: Authors: Aalok Patwardhan, Andrew J. Davison Dyson Discover the key techniques enabling robotic
Distributed Multi Robot Cooperation For - Detailed Analysis & Overview
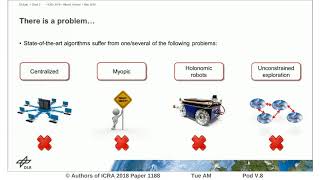
ICRA 2018 Spotlight Video Interactive Session Tue AM Pod V.8 Authors: Viseras, Alberto; Xu, Zhe; Merino, Luis Title: Authors: Aalok Patwardhan, Andrew J. Davison Dyson Discover the key techniques enabling robotic Pham Duy Hung and Trung Dung Ngo www.morelab.org 14 Lakeside Labs and NES institute of the Alpen-Adria-Universität are working on autonomous COMP Research Project - A Distributed Multi-Robot System
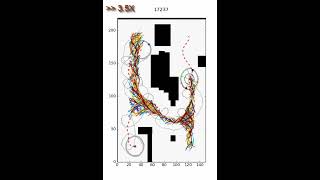
This is an extended work based on: An additional simulation video is added: ... MIT - Nov. 14, 2025 Speaker: Stephanie Gil Seminar title: Resilient