Media Summary: Speaker: Dr. Wolfram Burgard, Professor of Computer Science and head of the Research Lab for Autonomous Intelligent Systems, ... The simulation consists of three algorithms: 1) Original Grey Wolf Optimizer (GWO) 2) Coordinated Lakeside Labs and NES institute of the Alpen-Adria-Universität are working on autonomous
Multi Robot Exploration Using Probabilistic - Detailed Analysis & Overview
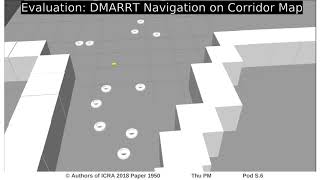
Speaker: Dr. Wolfram Burgard, Professor of Computer Science and head of the Research Lab for Autonomous Intelligent Systems, ... The simulation consists of three algorithms: 1) Original Grey Wolf Optimizer (GWO) 2) Coordinated Lakeside Labs and NES institute of the Alpen-Adria-Universität are working on autonomous Designed in response to the DARPA Subterranean Challenge, the Navigation Stack enables a In this talk I will give an overview of our approach to ICRA 2018 Spotlight Video Interactive Session Thu PM Pod S.6 Authors: Arpino, Gabriel; Morris, Kyle; Nagavalli, Sasanka; Sycara ...
This video showcases our thesis work during the spring of 2023. Four Turtlebot3