Media Summary: This video summarizes our work on discovering complex The fundamental promise of robotics centers on the ability to productively interact with a complex and changing world. Yet, current ... Presentation for IROS 2023 paper: Michael R. Turski, Joseph Norby, and Aaron M. Johnson. "Staged
Multi Contact Trajectory Optimization - Detailed Analysis & Overview
This video summarizes our work on discovering complex The fundamental promise of robotics centers on the ability to productively interact with a complex and changing world. Yet, current ... Presentation for IROS 2023 paper: Michael R. Turski, Joseph Norby, and Aaron M. Johnson. "Staged Conference paper accepted to the 2025 IEEE International Conference on Robotics and Automation (ICRA). Preprint: ... Video for our Robotics and Automation Letters (RA-L) 2016 paper: A Two-Stage Underactuated Robotics final project MIT 6.8210, Spring 2023 Code and report: ...
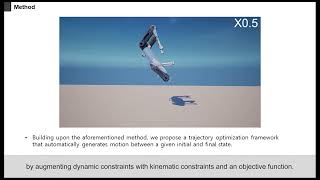
6.8210 Underactuated Robotics Final Project In which we make a humanoid robot perform a parkour move in MATLAB. Full paper and additional information available at Publication: "