Media Summary: 6.8210 Underactuated Robotics Final Project In which we make a In this paper, we introduce DynaRetarget, a complete pipeline for retargeting This work is published in IEEE Robotics and Automation Letters . Title: "Tailoring Solution Accuracy for Fast Whole-Body Model ...
Mit Humanoid Kong Trajectory Optimization - Detailed Analysis & Overview
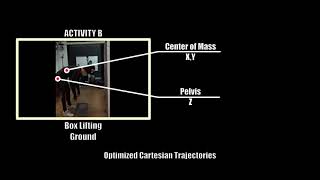
6.8210 Underactuated Robotics Final Project In which we make a In this paper, we introduce DynaRetarget, a complete pipeline for retargeting This work is published in IEEE Robotics and Automation Letters . Title: "Tailoring Solution Accuracy for Fast Whole-Body Model ... Multi-task prioritized controllers generate complex behaviors for The main idea of this work is to use data from full-body simulation of Okay and you can imagine now that writing a optimization problem if i wanted to do
Accompanying video to the paper "Multi-objective Final project for 6.832 Underactuated Robotics at