Media Summary: This video demonstrates use of the Denavit-Hartenberg convention for defining the reference In this video, we learn how to find a Denavit-Hartenberg parameter table, and then use the parameter table to find the ... ... easiest to see how this all comes together an
Worked Example Frame Assignment Dh - Detailed Analysis & Overview
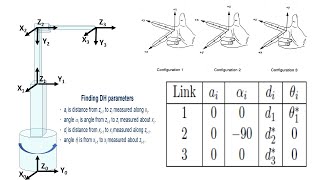
This video demonstrates use of the Denavit-Hartenberg convention for defining the reference In this video, we learn how to find a Denavit-Hartenberg parameter table, and then use the parameter table to find the ... ... easiest to see how this all comes together an Welcome to another enlightening session of MexE 406 Robotics 1! In this video, we are delving into the intricate world of