Media Summary: This video demonstrates use of the Denavit-Hartenberg convention for defining the reference ... easiest to see how this all comes together an For more robotics videos, go to www.robogrok.com.
Dh Frames Example Solution - Detailed Analysis & Overview
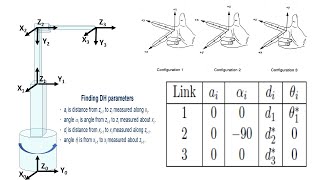
This video demonstrates use of the Denavit-Hartenberg convention for defining the reference ... easiest to see how this all comes together an For more robotics videos, go to www.robogrok.com. This part of the lecture explains the procedure for fixing In this video, we learn how to find a Denavit-Hartenberg parameter table, and then use the parameter table to find the ...