Media Summary: Video for the IROS 2021 submission. Preprint: Conference talk given at the 2020 International Conference on Robotics and Automation (ICRA). We present a method for ... We study the nonlinear observability of a system's states in view of how well they are observable and what control inputs would ...
Visibility Aware Trajectory Optimization With - Detailed Analysis & Overview
Video for the IROS 2021 submission. Preprint: Conference talk given at the 2020 International Conference on Robotics and Automation (ICRA). We present a method for ... We study the nonlinear observability of a system's states in view of how well they are observable and what control inputs would ... Robotic tasks involving contact interactions pose significant challenges for address the problem of exploration and sear with a ground mobile robot ... Talk at the ICRA'2021 conference, also journal publication: O. de Groot, B. Brito, L. Ferranti, D.M. Gavrila and J. Alonso-Mora.
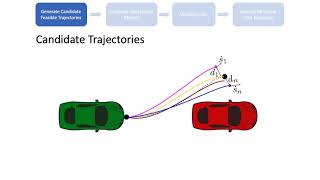
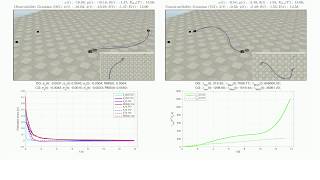
Abstract—In this paper we propose a novel approach for The attached video shows the simulation results of "Online Optimal Perception- Javier Alonso-Mora, an associate professor in the Department of Cognitive Robotics, Faculty 3mE, TU Delft, presented an ...