Media Summary: Javier Alonso-Mora, an associate professor in the Department of Cognitive Robotics, Faculty 3mE, TU Delft, presented an ... B. Zhou, W. Schwarting, D. Rus, and J. Alonso-Mora, "Joint Multi-Policy Behavior Estimation and Receding-Horizon ICRA 2021 conference paper Jonathan Hoff and Joohyung Kim University of Illinois Urbana-Champaign Abstract: Underactuated ...
Trajectory Optimization For Urban Driving - Detailed Analysis & Overview
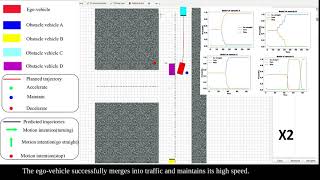
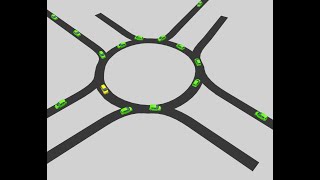
Javier Alonso-Mora, an associate professor in the Department of Cognitive Robotics, Faculty 3mE, TU Delft, presented an ... B. Zhou, W. Schwarting, D. Rus, and J. Alonso-Mora, "Joint Multi-Policy Behavior Estimation and Receding-Horizon ICRA 2021 conference paper Jonathan Hoff and Joohyung Kim University of Illinois Urbana-Champaign Abstract: Underactuated ... In IEEE International Conference on Robotics and Automation (ICRA) 2021 in Xi'an, China. Authors: Yuki Shirai, Xuan Lin, Ankur ... The objective of the ego vehicle is to efficiently navigate through a dense and congested This video shows how connected automated vehicles can improve
Abstract—In this paper we propose a novel approach for Numerical computations for the paper presented at 15th APCA International Conference on Automatic Control and Soft ...