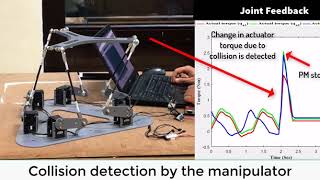
Media Summary: Sensor-less force control for ABB FRIDA robot Search TI motor drivers, and find reference designs and other technical resources. The video describes the content of the paper "Interaction
Sensor Less Force Control For - Detailed Analysis & Overview
Sensor-less force control for ABB FRIDA robot Search TI motor drivers, and find reference designs and other technical resources. The video describes the content of the paper "Interaction ABB dual arm robot perform a constraint-based The related paper is now published on IEEE Transactions on Instrumentation and Measurement ... This video demonstrates Blind Grasping, a robotic hand
I show you the difference between running sensored vs The International Conference on Functional Materials and Civil Engineering (CONF-FMCE 2023) Title of Speech: Toward ... Please look at for open source implementations of the demonstrated components.