Media Summary: The video describes the content of the paper "Interaction The video shows a service robot that helps a human carrying a plate from one room to another, trough a door. The robot does not ... Sensor-less force control for ABB FRIDA robot
Constraint Based Sensorless Force Control - Detailed Analysis & Overview
The video describes the content of the paper "Interaction The video shows a service robot that helps a human carrying a plate from one room to another, trough a door. The robot does not ... Sensor-less force control for ABB FRIDA robot Dr. Francesco Nori from from the Instituto Italiano di Tecnologia (Italian Institute of Technology), is one of the key contributors to ... The dual arm robot is performing a task while being compliant with respect to external Presented at the 14th International Human-Friendly Robotics Workshop on 28 October 2021 Link to paper: ...
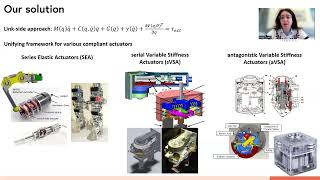
Paper published in IEEE RA-L and presented at ICRA 2023 in London, UK. Authors: Maja Trumic, Giorgio Grioli, Kosta Jovanovic, ... (Semi-) autonomous complex UAV missions, such as inspection or search-and-rescue in uncertain dynamic environments, ...