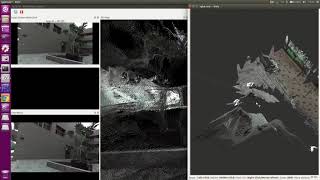
Media Summary: RTAB-Map 2D Mapping Using LiDAR and Depth Camera (gazebo_sim + ROS 2 jazzy) Testing of Various SLAM Systems for Mobile Robot in an Indoor Environment. Point Cloud Generation using RTABMAP & ZED Stereo Camera
Rtabmap Zed - Detailed Analysis & Overview
RTAB-Map 2D Mapping Using LiDAR and Depth Camera (gazebo_sim + ROS 2 jazzy) Testing of Various SLAM Systems for Mobile Robot in an Indoor Environment. Point Cloud Generation using RTABMAP & ZED Stereo Camera