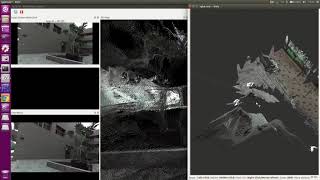
Media Summary: Point Cloud Generation using RTABMAP & ZED Stereo Camera RTAB-Map with Zed2 stereo camera (localizing different image sequence into existing map, SIFT)
Rtabmap Test With Zed Stereo - Detailed Analysis & Overview
Point Cloud Generation using RTABMAP & ZED Stereo Camera RTAB-Map with Zed2 stereo camera (localizing different image sequence into existing map, SIFT)