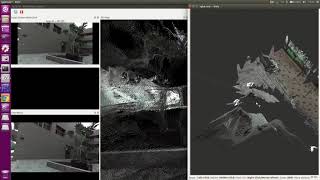
Media Summary: Testing of Various SLAM Systems for Mobile Robot in an Indoor Environment. RTAB-Map with Zed2 stereo camera (localizing different image sequence into existing map, SIFT) Jetson Xavier와 Realsens D435i 카메라를 사용해
Rtabmap Running On Zed Camera - Detailed Analysis & Overview
Testing of Various SLAM Systems for Mobile Robot in an Indoor Environment. RTAB-Map with Zed2 stereo camera (localizing different image sequence into existing map, SIFT) Jetson Xavier와 Realsens D435i 카메라를 사용해 This project will build map on ROS platform based on











![[ROS] Mapping based on ZED Camera and Jetson TX2](https://i.ytimg.com/vi/OGnmODjk6VQ/mqdefault.jpg)