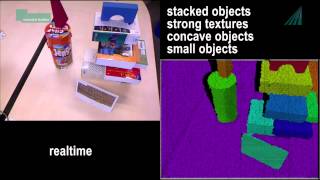
Media Summary: This video demonstrates two testing phases: - First test segments low noise cloud with high accurate Presented in IEEE International Conference on Robotics and Automation, Montreal Canada, May 20-24, 2019. Paper: ... Video attachement for: Arul Selvam Periyasamy, Max Schwarz, and Sven Behnke: "
Robust Object Segmentation In Cluttered - Detailed Analysis & Overview
This video demonstrates two testing phases: - First test segments low noise cloud with high accurate Presented in IEEE International Conference on Robotics and Automation, Montreal Canada, May 20-24, 2019. Paper: ... Video attachement for: Arul Selvam Periyasamy, Max Schwarz, and Sven Behnke: " Video illustrating our paper "Probabilistic We present a real-time algorithm that segments unstructured and highly Authors: Andreas Robinson, Felix Järemo Lawin, Martin Danelljan, Fahad Shahbaz Khan, Michael Felsberg Description: Video ...
Authors: Angtian Wang, Yihong Sun, Adam Kortylewski, Alan L. Yuille Description: Detecting partially occluded IROS 2020 presentation video for "Cloth Region Accepted for presentation in IEEE International Conference on Robotics and Automation, Paris France, May 31-June 4, 2020. Robust Grasping for Individual and Cooperative Table Cleaning