Media Summary: Robust 6D Object Pose Estimation with Stochastic Congruent Sets (BMVC '18) Video attachement for: Arul Selvam Periyasamy, Max Schwarz, and Sven Behnke: " Bowen Wen from Rutgers University specializes in Robotics, Vision, and Deep Learning. We are very happy to share his excellent ...
Robust 6d Object Pose Estimation - Detailed Analysis & Overview
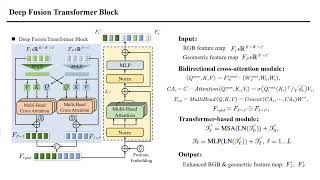
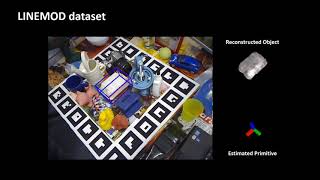
Robust 6D Object Pose Estimation with Stochastic Congruent Sets (BMVC '18) Video attachement for: Arul Selvam Periyasamy, Max Schwarz, and Sven Behnke: " Bowen Wen from Rutgers University specializes in Robotics, Vision, and Deep Learning. We are very happy to share his excellent ... Deep Fusion Transformer Network with Weighted Vector-Wise Keypoints Voting for MyungHwan Jeon and Ayoung Kim, PrimA6D: Rotational Primitive Reconstruction for Enhanced and 6D Object Pose Estimation from Approximate3 3D Models for Orbital Robotics
Authors: Kentaro Wada, Edgar Sucar, Stephen James, Daniel Lenton, Andrew J. Davison Description: Robots and other smart ... Starting met de brief de finish en altijd sixty Authors: Bo Chen (The University of Adelaide)*; Tat-Jun Chin (The University of Adelaide); Marius Klimavicius (Blackswan ... Get FREE Robotics & AI Resources (Guide, Textbooks, Courses, Resume Template, Code & Discounts) – Sign up via the pop-up ...