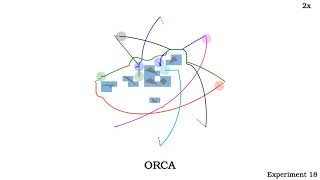
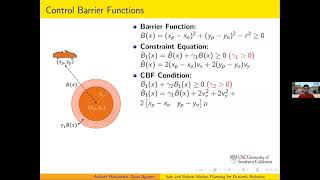
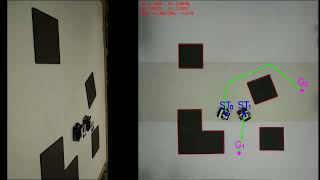
Media Summary: ICRA 2012 submission. In this video, we demonstrate the results of our approach for two case studies: with and without ... Supplemental video for our paper at DARS 2018. Authors: B. Şenbaşlar, W. Hönig, and N. Ayanian. Abstract: Preprint: Abstract: Control Barrier Functions (CBF) are widely used to enforce the safety-critical ...
Robust Multi Robot Path Planning - Detailed Analysis & Overview
ICRA 2012 submission. In this video, we demonstrate the results of our approach for two case studies: with and without ... Supplemental video for our paper at DARS 2018. Authors: B. Şenbaşlar, W. Hönig, and N. Ayanian. Abstract: Preprint: Abstract: Control Barrier Functions (CBF) are widely used to enforce the safety-critical ... C. Ghedini, C. Secchi, C. H. C. Ribeiro, L. Sabattini Paper submitted to IFAC SYROCO 2015 ICRA 2018 Spotlight Video Interactive Session Wed AM Pod E.3 Authors: Mangelson, Joshua; Dominic, Derrick; Eustice, Ryan; ...

![Multi-Robot Planning [Lecture, Marija Popović]](https://i.ytimg.com/vi/Wcvw8qyUan8/mqdefault.jpg)