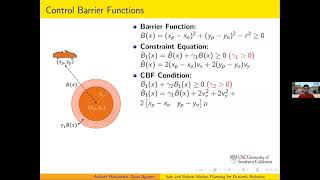
Media Summary: Preprint: Abstract: Control Barrier Functions (CBF) are widely used to enforce the safety-critical ... Kontoudis, G. P; and Vamvoudakis, K. G. " Hierarchical Temporal Logic Task and Motion Planning for Multi Robot Systems
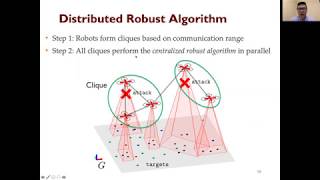
Robust Motion Planning For Multi - Detailed Analysis & Overview
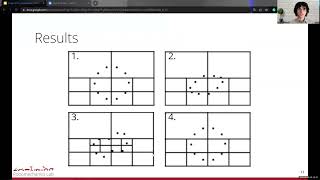
Preprint: Abstract: Control Barrier Functions (CBF) are widely used to enforce the safety-critical ... Kontoudis, G. P; and Vamvoudakis, K. G. " Hierarchical Temporal Logic Task and Motion Planning for Multi Robot Systems ICRA 2012 submission. In this video, we demonstrate the results of our approach for two case studies: with and without ...