Media Summary: Robust Computation Offloading and Trajectory ICRA 2021 Best Automation Paper Award Finalist. We study the problem of estimating and trackingan unknown
Robust Computation Offloading And Trajectory - Detailed Analysis & Overview
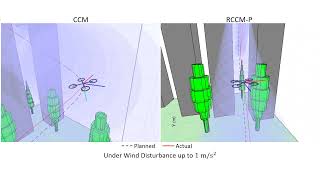
Robust Computation Offloading and Trajectory ICRA 2021 Best Automation Paper Award Finalist. We study the problem of estimating and trackingan unknown Work submitted to the 2023 International Conference on Robotics and Automation (ICRA). Preprint available on Arxiv: ... Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021 accepted. * Category: Motion and This video shows a simulation, coded in MATLAB and Unity 3D, of a new
This work is led by Luke Drnach from the LIDAR group. We proposed a This video introduces an approach towards guaranteed Demonstration of faster object recognition and tracking using