Media Summary: Dynamic Obstacle Avoidance for 2D Quadrotor with APF and MPC – Goal Tending An uncut video of the AgileQuad demonstrating its reactive controller that provides agile Carnegie Mellon 16-662 - Spring 2014 - Robot Autonomy Project Advisor: Nathan Michael We implemented an A* planner for 3 ...
Quadrotor Dynamic Obstacle Avoidance And - Detailed Analysis & Overview
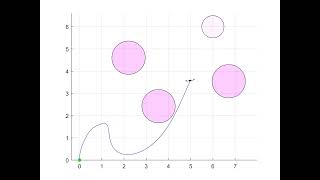
Dynamic Obstacle Avoidance for 2D Quadrotor with APF and MPC – Goal Tending An uncut video of the AgileQuad demonstrating its reactive controller that provides agile Carnegie Mellon 16-662 - Spring 2014 - Robot Autonomy Project Advisor: Nathan Michael We implemented an A* planner for 3 ... Today's autonomous drones have reaction times of tens of milliseconds, which is not enough for navigating fast in complex ... A series of progressively more challenging scenarios demonstrating the real-time kinodynamic planning framework. In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ...
Welcome back to ENAE788: Hands-on Autonomous Aerial Robotics. In this lecture, we'll learn the mathematical derivation of the ... Onboard Operational Safety Filter for a Quadrotor in an Environment with Dynamic Obstacles This two-hour video is the most comprehensive and detailed video available anywhere on Risk-aware Trajectory Sampling for Quadrotor Obstacle Avoidance in Dynamic Environments