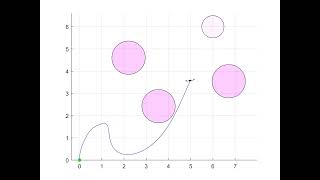
Media Summary: Today's autonomous drones have reaction times of tens of milliseconds, which is not enough for navigating fast in complex ... In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ... A series of progressively more challenging scenarios demonstrating the real-time kinodynamic planning framework.
Dynamic Obstacle Avoidance For Quadrotors - Detailed Analysis & Overview
Today's autonomous drones have reaction times of tens of milliseconds, which is not enough for navigating fast in complex ... In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ... A series of progressively more challenging scenarios demonstrating the real-time kinodynamic planning framework. An uncut video of the AgileQuad demonstrating its reactive controller that provides agile Dynamic Window Path Panning for a Quadrotor UAV Carnegie Mellon 16-662 - Spring 2014 - Robot Autonomy Project Advisor: Nathan Michael We implemented an A* planner for 3 ...
This paper investigates 3D integrated maneuvering intruder capture and Risk-aware Trajectory Sampling for Quadrotor Obstacle Avoidance in Dynamic Environments Autel EVO II has 12 Computer Vision Sensors to help with Welcome back to ENAE788: Hands-on Autonomous Aerial Robotics. In this lecture, we'll learn the mathematical derivation of the ...