Media Summary: Trajectory generation in dynamic environments is a challenging problem in Sumeet Singh (Google), Hiroyasu Tsukamoto (Caltech), Brett Lopez (UCLA), Soon-Jo Chung (Caltech), Jean-Jacques Slotine ... This video shows our path planner for navigating in dynamic environments. The PR2 robot tracks people, predicts where they will ...
Safe Interval Motion Planning For - Detailed Analysis & Overview
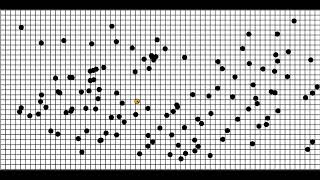
Trajectory generation in dynamic environments is a challenging problem in Sumeet Singh (Google), Hiroyasu Tsukamoto (Caltech), Brett Lopez (UCLA), Soon-Jo Chung (Caltech), Jean-Jacques Slotine ... This video shows our path planner for navigating in dynamic environments. The PR2 robot tracks people, predicts where they will ... See the other videos in this series: This video ... ICAPS 2020 talk on the paper Konstantin Yakovlev, Anton Andreychuk, Roni Stern. Revisiting Bounded-Suboptimal This video demonstrates animation of manipulator's path in dynamic environment, retrieved by DRGBT (Dynamic Rapidly ...



![[2020 Oct] Bounded Sub-optimal Safe Interval Path Planning](https://i.ytimg.com/vi/dRFX9kxhJTI/mqdefault.jpg)