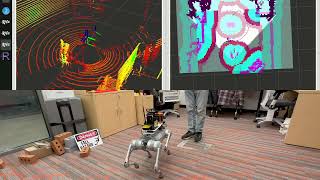
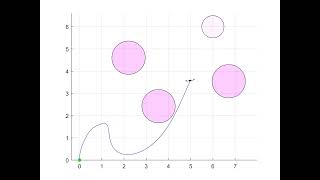
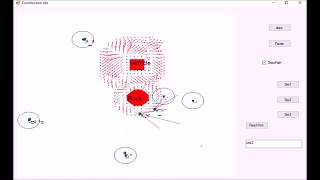
Media Summary: Dynamic Obstacle Avoidance for 2D Quadrotor with APF and MPC – Goal Tending MPC with Velocity Obstacle for Dynamic Obstacles 2D Point Cloud Segmentation for dynamic obstacle avoidance
Dynamic Obstacle Avoidance For 2d - Detailed Analysis & Overview
Dynamic Obstacle Avoidance for 2D Quadrotor with APF and MPC – Goal Tending MPC with Velocity Obstacle for Dynamic Obstacles 2D Point Cloud Segmentation for dynamic obstacle avoidance We present a hybrid feedback approach to solve the navigation problem of a point mass in the n−dimensional space containing ... This video illustrates a planar quadrotor (quadrotor confined to the In this tutorial I did several experiments to train a robot to avoid
This video is a demonstration of the Deep Reinforcement Learning Policies from the paper "Comparison of Deep Reinforcement ... Simulation of the interaction between moving objects in Rubedos 3D visual perception system VIPER provides smart navigation assistance. Notice how VIPER, thanks to its high vertical ... In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ...