Media Summary: This video provides some intuition around This is a short video lecture by Wolfram, Giorgio, and Cyrill explaining This project is another filter implementation for my EKF-
Pose Graph Optimization Using Slam - Detailed Analysis & Overview
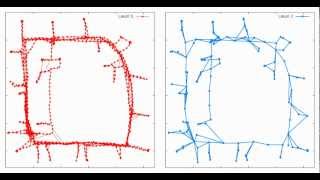
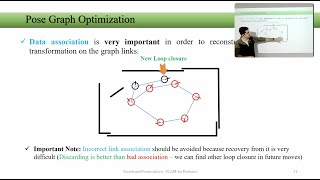
This video provides some intuition around This is a short video lecture by Wolfram, Giorgio, and Cyrill explaining This project is another filter implementation for my EKF- Giorgio Grisetti, Rainer Kümmerle, Cyrill Stachniss, Udo Frese, and Christoph Hertzberg Hierarchical frame to frame pose estimation - find loop closing - Filtering methods like the Extended Kalman Filter fail due to quadratic complexity in state size.
This video is part of an online course, Intro to Artificial Intelligence. Check out the course here: ...