Media Summary: Filtering methods like the Extended Kalman Filter fail due to quadratic complexity in state size. This video provides some intuition around Pose This video is part of an online course, Intro to Artificial Intelligence. Check out the course here: ...
Graph Based Slam And Loop - Detailed Analysis & Overview
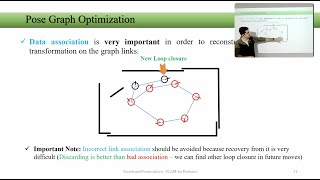
Filtering methods like the Extended Kalman Filter fail due to quadratic complexity in state size. This video provides some intuition around Pose This video is part of an online course, Intro to Artificial Intelligence. Check out the course here: ... This is a short video lecture by Wolfram, Giorgio, and Cyrill explaining Supporting video for the public repository of ROS package cmr_lidarloop ( 2021, ... Ever wondered how robots and autonomous systems navigate their environment with precision? This video dives into a critical ...
The idea of assignment 10 of Robot Mapping taught by Dr. Cyrill Stachniss is to