Media Summary: This video is part of an online course, Intro to A presentation by Andrew Davison as part of the Tartan This video provides some intuition around Pose
Graph Slam Artificial Intelligence For - Detailed Analysis & Overview
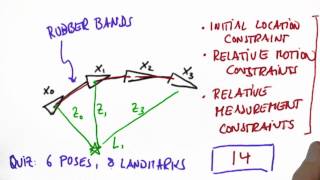
This video is part of an online course, Intro to A presentation by Andrew Davison as part of the Tartan This video provides some intuition around Pose The robot is estimating its pose and surrounding map simultaneously. The map is represented as a occupancy grid. Under the ... ICRA 2018 Spotlight Video Interactive Session Wed AM Pod U.4 Authors: Schlegel, Dominik; Colosi, Mirco; Grisetti, Giorgio Title: ... This is a short video lecture by Wolfram, Giorgio, and Cyrill explaining
Abstract: Many estimation, planning and optimal control problems in robotics have an optimization problem at their core. In most of ...