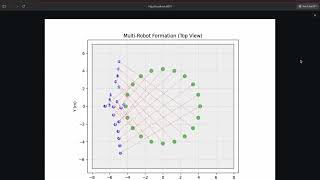
Media Summary: We present a constrained optimization method for We developed an O(n^3) algorithms for the reconfiguration of The video consists of two parts, both demonstrating different aspects of the ROS implementation of our approach on automated ...
Optimal Multi Robot Formations For - Detailed Analysis & Overview
We present a constrained optimization method for We developed an O(n^3) algorithms for the reconfiguration of The video consists of two parts, both demonstrating different aspects of the ROS implementation of our approach on automated ... Sven Koenig Professor, Computer Science Department, University of Southern California (USC) Abstract Teams of An Effective Framework for Near-Optimal Multi-Robot Path Planning








![Multi-Robot Planning [Lecture, Marija Popović]](https://i.ytimg.com/vi/Wcvw8qyUan8/mqdefault.jpg)