Media Summary: ICRA 2018 Spotlight Video Interactive Session Tue AM Pod L.8 Authors: Sandy, Timothy; Buchli, Jonas Title: Accepted to ICRA 2020 In this paper we investigate the effect of ... Direct edge alignment based visual inertial fusion for tracking of aggressive motions
Object Based Visual Inertial Tracking - Detailed Analysis & Overview
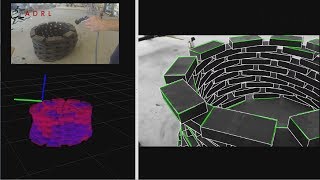
ICRA 2018 Spotlight Video Interactive Session Tue AM Pod L.8 Authors: Sandy, Timothy; Buchli, Jonas Title: Accepted to ICRA 2020 In this paper we investigate the effect of ... Direct edge alignment based visual inertial fusion for tracking of aggressive motions This video supplement corresponds to the manuscript ' We investigate the effect of tightly-coupled estimation on the performance of