Media Summary: Direct edge alignment based visual inertial fusion for tracking of aggressive motions This work is presented at the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017). Code is ... Publication: Tight Integration of Feature-
Direct Edge Alignment Based Visual - Detailed Analysis & Overview
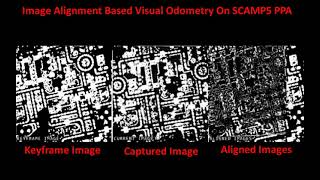
Direct edge alignment based visual inertial fusion for tracking of aggressive motions This work is presented at the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017). Code is ... Publication: Tight Integration of Feature- Zhiding Yu, Weiyang Liu, Yang Zou, Chen Feng, Srikumar Ramalingam, B. V. K. Vijaya Kumar and Jan Kautz Simultaneous Direct Image Alignment (SE2) Using Gauss-Newton Algorithm (Forward-Additive Lucas-Kanade) One of the biggest issues most players face is how to