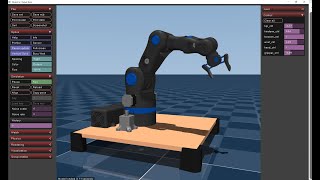
Media Summary: rom standing still to walking forward — this video implements a complete bipedal locomotion pipeline for the Unitree G1 ... ... and torque profiles This is part of the Shantanu covers the first of many simulation environments we'll be rolling out this summer. First up is
Mujoco Robotics Lab 7 Making - Detailed Analysis & Overview
rom standing still to walking forward — this video implements a complete bipedal locomotion pipeline for the Unitree G1 ... ... and torque profiles This is part of the Shantanu covers the first of many simulation environments we'll be rolling out this summer. First up is