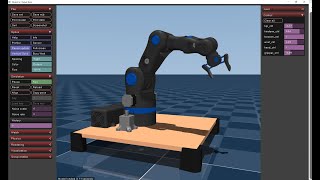
Media Summary: Shantanu covers the first of many simulation environments we'll be rolling out this summer. First up is Mujoco and Unity based Digital Twin Robotic Arm with Neuromorphic event camera dataset creator. rom standing still to walking forward — this video implements a complete bipedal locomotion pipeline for the Unitree G1 ...
Mujoco Robotic Arm - Detailed Analysis & Overview
Shantanu covers the first of many simulation environments we'll be rolling out this summer. First up is Mujoco and Unity based Digital Twin Robotic Arm with Neuromorphic event camera dataset creator. rom standing still to walking forward — this video implements a complete bipedal locomotion pipeline for the Unitree G1 ... Will goes over how to create and simulate a Doosan Robotics MuJoCo support demo - M1013 pick & place on slide, controlled by DSR2 (ROS2) 20250305_MuJoCo-Unity-ROS2-Hardware 연동 플랫폼 (
The grand finale: a VLA policy controls the Unitree G1 humanoid in A UR5e with a custom parallel-jaw gripper picks up a box and places it precisely — integrating everything from Labs 1-4 into a ...